Projects
ROS 2 Navigation with a nano-quadcopter
2022 - 2024 - Bitcraze
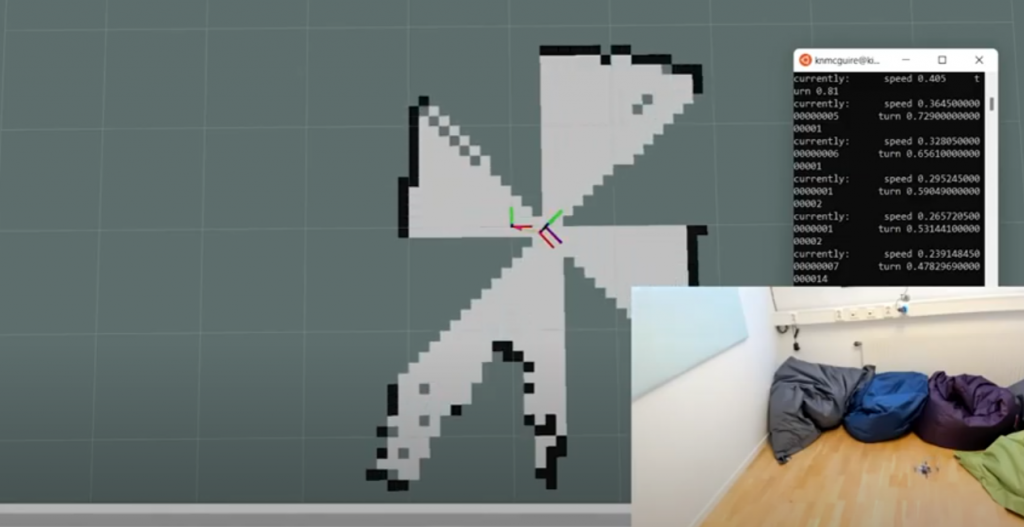
During this project, I've connected a nano quadcopter with the ROS 2 framework through the Crazyswarm2 project. This allowed me to connect it to simulation, navigation packages like NAV2, or simpler mapping and navigation package strategies.
Related Links
Robotic simulators of nano-quadcopters
2021 - 2022 - Bitcraze

I've built multiple models for the nano-quadcopter, the Crazyflie, creating a low-poly Collada model suitable for multi-quadcopter simulation. These have been implemented with collision models, propeller physics, and control in both Webots and the new Gazebo.
Related Links
- Blogposts
- ICRA 2023 Workshop on Aerial Robotics Simulation:
- IEEE Robotics & Automation journal paper:
Game development learning path
2020 - 2021 - Personal
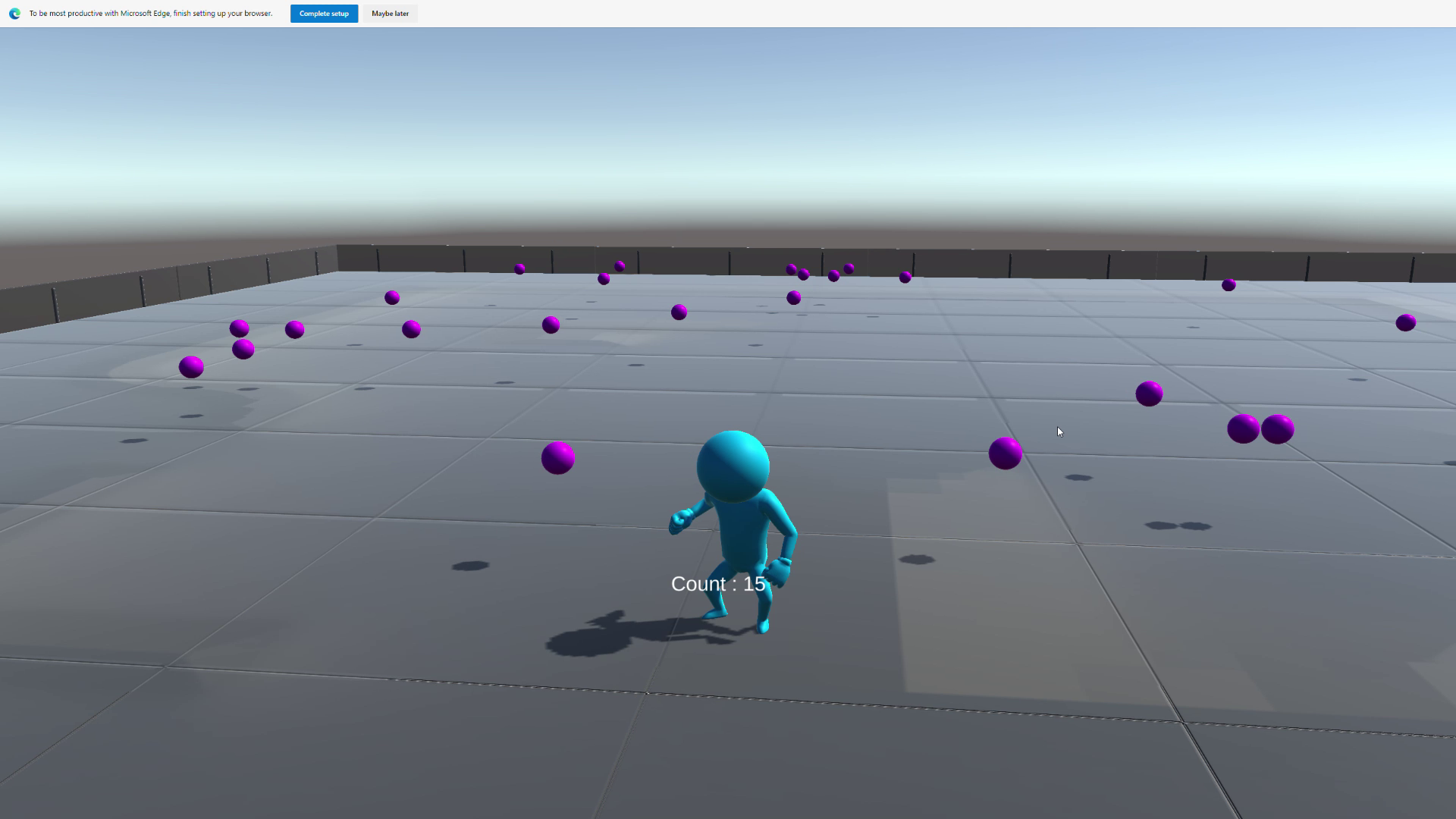
During the height of the covid pandamic, I've taken many courses on game development, namely Unity and Godot. Here I've learned the basics of the game engines and followed the programming pathway such that I could create some simple 3D games and experience mixed reality development. It gave me a better understanding of the mechanics of games and robotic simulation as well.
Related Links
Swarm Gradient Bug Algorithm
2018 - 2019 - TU Delft

(Guus Schoonewille, TU Delft)
I've researched how a swarm of tiny quadcopters can autonomously fly indoors without external positioning help. This posed a significant challenge, requiring individual quadcopters to fly independently and the swarm to communicate for coordination and avoidance. To address this, I developed SGBA, the Swarm Gradient Bug Algorithm.
Related Links
Autonomous pocket drone for Swarm Exploration
2015 - 2018 - TU Delft

Back in 2015, there was no standard platform for autonomous swarming for indoor exploration. Until the folks at Bitcraze released the right expansion decks, I had to develop my own platform for this by combining different modules together, developed internally by the engineers from MAVlab, TU Delft.
Related Links
Binocular Vision Stabilization
2014 - TU Delft
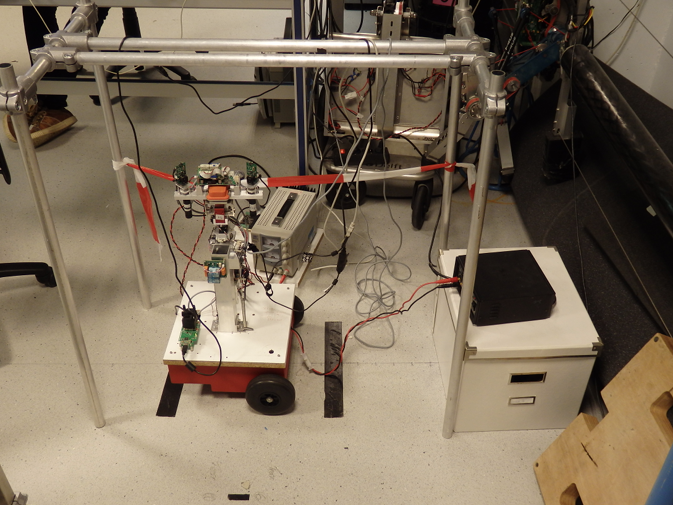
I've developed a neural network model for the stabilization of the cameras of a binocular robotic head, based on the human cerebellum. This is based on the theory that the cerebellum processes a massive amount of sensor information and filters out the most important data for the task. This enabled the robot to more smoothly track the marker despite external disturbances, inspired by mechanisms in our own brain
Related Links
Coded Infrared-Cut Filter
2013 - 2014 - NEC
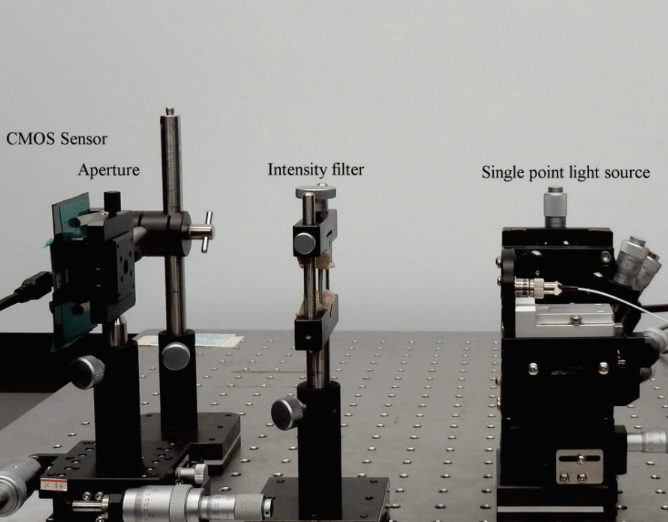
As an intern at the NEC Corporation in Tokyo, Japan, I worked in the Information and Media Processing Labs. I focused on validating a novel high-sensitivity sensing method for computational photography. With a coded infrared cut filter, the concept could be used on regular security cameras to capture both images in the visual spectrum and infrared, which can be useful in low-light conditions.
Related Links
Wearable timelapse camera
2011 - TU Delft

Before switching to Mechanical Engineering, I completed my final project in Industrial Design Engineering. John's Phone is a company that made extremely simple cellphones as an anti-movement to smart iPhones. As the next product in their line, I conceptualized the 'John's Camera,' a wearable timelapse camera that can be clipped on and record the user's day.